Использование 3D графики в моделировании работы управляющих программ Автор: Козак Н.В. аспирант; Киселёв С.А. студент
ГОУ МГТУ "СТАНКИН", кафедра КСУ
Опубликовано: 13.05.2007
Версия текста: 1.0
На сегодняшний день средства визуализации являются важной частью системы электроавтоматики. В статье предлагается применение трехмерной графики для моделирования работы управляющих программ с использованием трехмерных объектов производства (манипуляторов, роботов, конвейеров и т.п.).
Контроллер представляет собой устройство, которое управляет периферийным оборудованием, освобождая центральный процессор системы управления от непосредственного управления периферией. Контроллер подключается к датчикам и исполняющим устройствам объекта управления. Он служит для снятия показаний датчиков, первоначальной обработки этих показателей и передачи информации на оборудование серверов или пульта оператора. Управления объектом осуществляется по загруженной в контроллер управляющей программе или прямым командам оператора.
Существуют следующие способы разработки управляющих программ: ручное программирование, программирование на стойке ЧПУ и программирование при помощи CAM-систем [2].
Основными задачами CAM-систем являются создание, проверка и отладка управляющих программ для последующего применения в производстве. Эти задачи являются важными и трудоемкими процедурами. Ошибки в управляющих программах могут привести к поломке станка, манипулятора, а также к порче заготовок.
На сегодняшний день аналогами визуализации объектов производства являются 3S, ABB, KUKA. Визуализация в системе управления CoDeSys (3S) - это встроенная 2d визуализация, использующая графические элементы, такие как прямоугольник, эллипс, окружность, полигон, полилиния и кривые Безье [3]. Отображение визуализации происходит в следующих режимах:
- HMI: специальное Windows приложение для <проигрывания> визуализации;
- CoDeSys Целевая (target) визуализация: работает в самом контроллере. Применяется в системах, имеющих монитор. Программируется на стойке ЧПУ;
- CoDeSys Web визуализация: результат визуализации отображается в Интернет браузере [1].
Рассмотрев возможности системы CoDeSys можно сказать, что использование 2D графики в моделировании работы управляющих программ на сегодняшней день не представляет большого интереса. Это объясняется её достаточно условной визуализацией.
Фирма KUKA и ABB [4], являются одними из лидеров в области 3D визуализации собственных систем электроавтоматики. Средства визуализации этих фирм имеют практически всю возможную функциональность для моделирования производств. Единственным найденным недостатком фирм KUKA и ABB является то, что в их системах визуализации, возможно использование 3D объектов только их собственного производства. Т.о. просматривается необходимость в создании общего средства визуализации, которое бы могло поддерживать как продукцию фирмы ABB, так и KUKA и других фирм.
Программа Visual Execution 3D (VE) создана для моделирования работы управляющих программ контроллеров при помощи 3D моделей. Цель проекта - подготовка управляющих программ контроллеров с помощью средства визуализации VE для дальнейшего внедрения этих программ в производства.
На первом этапе разработки (Рис. 1), моделирование управляющих программ контроллеров, выполняется перенос в сцену визуализации, используя технологии 'Drag & Drop', все нужные 3D объекты, извлекаемые из библиотек визуальных объектов. Библиотека визуальных объектов - это 3D объекты отдельно взятых частей робота, такие как станина, механические звенья, двигатели и т.д. На следующем этапе разработки создается иерархия визуальных объектов, а также позиционирование 3D объектов. К главной особенности иерархии относится визуальный объект <двигатель>, который в дальнейшем будет являться управляющим звеном в управляющей программе. (Рис. 1).
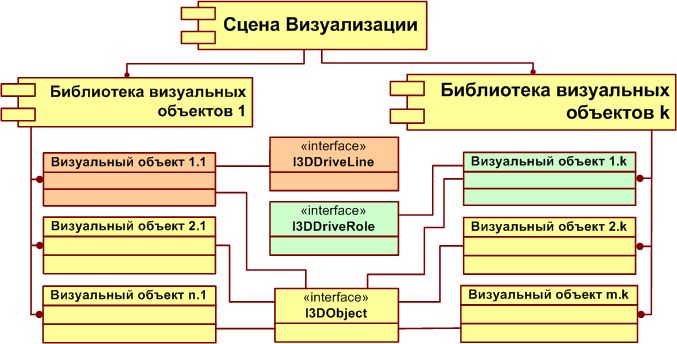
Рис. 1 Архитектура Visual Execution 3D
К третьему этапу разработки относится программирование управляющих программ, используя такие языки как ST или SFC. Программирование производится в программах сторонних разработчиков. К Последнему этапу относится моделирование управляющих программ котроллеров. На этом этапе происходит отладка производства, которая позволяет обнаружить возможные столкновения с другими визуальными объектами. Это позволяет, еще до реализации в производства, исправить или улучшить управляющие программы котроллеров.
Рис. 2. Этапы разработки модели управляющей программы котроллера.
Рис. 3. Интерфейс программы Visual Execution 3D
Главные особенности интерфейсной части программы (Рис. 3):
динамическое масштабирование, перемещение и вращение;
удобное древовидное представление иерархии моделируемых объектов;
настройка видовых экранов на различные конфигурации отображения;
Визуальное средство VE позволяет подготавливать новый персонал, студентов или собственных сотрудников, без участия дорогостоящего оборудование. Использование VE позволит выявить и исправить ошибки, касающиеся как расположение объектов, так и ошибки управляющих программ. Что позволит снизить риск поломки оборудование.
Визуальное средство VE не имеет функциональности для построения собственных визуальных объектов, что является ее значительным недостатком. Решением этой проблемы является программы сторонних разработчиков, как например AutoCad, или постоянна расширяющаяся собственная библиотека 3D объектов.
Использование 3D визуализации, возможность применения и обновления в ней библиотек 3D объектов различных фирм, позволяет в значительной степени улучшить процесс разработки управляющих программ для производства:
HMI задачи могут выполняться более эффективно за счет естественного объемного представления производственных объектов;
затраты на проектирование производства могут быть снижены за счет применения технологии прототипов.
ЛИТЕРАТУРА
- Мартинов Г. М., Козак Н. В. Декомпозиция и синтез программных компонентов электроавтоматики // Приборы и системы. Управление, контроль, диагностика. 2006. №12. C. 4-11.
- Петров И.В., Программируемые контроллеры. "Стандартные языки и приемы прикладного проектирования" / Под ред. проф. В.П. Дьяконова.-М.:СОЛОН-Пресс, 2004. - 256с.
- http://ad.cctpu.edu.ru/SAPR/SAPR_02/cadcam/Default.htm - Обзор CAM систем.
- www.CoDeSys.com
- www.ABB.ru
Любой из материалов, опубликованных на этом сервере, не может быть воспроизведен в какой бы то ни было форме и какими бы то ни было средствами без письменного разрешения владельцев авторских прав. |